一、使用标准库点亮LED——采用中断模式编程
1.点亮LED灯
要求:用stm32F103核心板的GPIOA端一管脚接一个LED,GPIOB端口一引脚接一个开关(用杜邦线模拟代替)。采用中断模式编程,当开关接高电平时,LED亮灯;接低电平时,LED灭灯。
之前的文章有写到过用寄存器点亮LED灯,在这个的基础上,我们采用标准库点亮LED灯,并用一个开关控制灯亮灯灭。实验中我们使用PB5口点亮LED灯。
代码如下:
main.c
#include "stm32f10x.h"
#include "usart.h"//串口通信的头文件
//#include "led.h"
#include "exti_key.h"
void delay(uint16_t time)
{
uint16_t i =0;
while(time--){
i=12000;
while(i--);
}
}
int main(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//打开时钟
//固定模式配置
GPIO_InitTypeDef Led_init;
Led_init.GPIO_Mode = GPIO_Mode_Out_PP;
Led_init.GPIO_Pin = GPIO_Pin_5;
Led_init.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &Led_init);
GPIO_ResetBits(GPIOB,GPIO_Pin_5);//点亮LED灯
//中断函数
EXTI_Key_Init();
usart_init();
while(1)
{
//串口发送消息,单纯的点灯可以不写这两句
usartSendStr(USART1,"Hello word\r\n");
delay(1000);
}
}exti_key.h
#ifndef __EXTI_KEY_H
#define __EXTI_KEY_H
#include "stm32f10x.h"
void EXTI_Key_Init(void);
#endif
exti_key.c
#include "exti_key.h"
#include "misc.h"
void EXTI_Key_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA,&GPIO_InitStructure);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitStructure.NVIC_IRQChannel = EXTI3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_ClearITPendingBit(EXTI_Line3);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource3);
EXTI_InitStructure.EXTI_Line = EXTI_Line3;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
}
uint8_t led =1;
void EXTI3_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line3) != RESET)
{
led = ~led;
if(led == 1)
GPIO_ResetBits(GPIOB,GPIO_Pin_5);
else
GPIO_SetBits(GPIOB,GPIO_Pin_5);
}
EXTI_ClearITPendingBit(EXTI_Line3);
}2.点亮LED的同时进行串口通信
要求:完成上述点灯实验后,尝试在main函数while循环中加入一个串口每隔1s 发送一次字符的代码片段,观察按键中断对串口发送是否会带来干扰或延迟。
在上面点灯代码的基础上,我们再加上串口通信的代码即可。
usarh.c
#include "usart.h"
#include "stm32f10x.h"
void usart_init(void)
{
GPIO_InitTypeDef gpio_init;
USART_InitTypeDef usartStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//2.1 TX
gpio_init.GPIO_Mode = GPIO_Mode_AF_PP;
gpio_init.GPIO_Pin = GPIO_Pin_9;
gpio_init.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&gpio_init);
//2.2 RX
gpio_init.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio_init.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOA,&gpio_init);
usartStruct.USART_BaudRate = 115200;
usartStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
usartStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
usartStruct.USART_Parity = USART_Parity_No;
usartStruct.USART_StopBits = USART_StopBits_1;
usartStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1,&usartStruct);
USART_Cmd(USART1, ENABLE );
}
void usartSendByte(USART_TypeDef* USARTx, uint16_t Data)
{
USART_SendData(USARTx,Data);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void usartSendStr(USART_TypeDef* USARTx,char *str)
{
uint16_t i = 0;
do{
usartSendByte(USARTx,*(str+i));
i++;
}while(*(str+i) != '\0');
while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
}
usatr.h
#include "stm32f10x.h"
#include <stdio.h>
void usart_init(void);
void usartSendByte(USART_TypeDef* USARTx, uint16_t Data);
void usartSendStr(USART_TypeDef* USARTx,char *str);
效果如下:
我们在写标准库点亮LED灯的时候加入了中断函数,当我们PB3接入高电平时,LED灯亮;接入低电平时熄灭。于此同时,我们还在while循环里面增加了串口通信,向上位机(win10)输出“hello word",通过串口助手我们可以观测到上位机可正常接受单片机发出的信息,由此可知中断函数的加入并不影响串口的通信。
二、串口通信
1.通讯
串行通讯与并行通讯
串行通讯:设备之间通过少量数据信号线,地线以及控制信号线,按数据形式一位一位地传输数据。
并行通讯:设备之间通过信号线,同时传输多个数据位的数据。
串行通讯的通讯距离和抗干扰能力要优于并行通讯,并且成本更低,而并行通讯的传输速率要优于串行通讯。
全双工,半双工和单工通讯
全双工通讯:设备之间可以同时收发数据。
半双工通讯:设备之间可以收发数据,但是不能够同时进行。
单工通讯:单方向的进行数据的发送和接收,即一个设备要么作为发送设备,要么作为接收设备。
同步通讯和异步通讯
同步通讯:收发双方使用同一个信号线作为时钟信号,在时钟信号的驱动下双方进行协调,同步数据。
异步通讯:不采用时钟信号进行数据同步,而是在数据信号中穿插一些同步用的信号位来实现同步。
本文章介绍的是一种常用的串行通讯方式——串口通讯
2.串口通讯
两种电平标准
TTL标准:当电平处于2.4~5V之间时,表示逻辑1;当电平处于 0 ~0.5V时,表示逻辑0。
RS-232标准:当电平处于-15~-3V之间时,表示逻辑1;当电平处于3 ~15V时,表示逻辑0。
RS-232标准的传输距离及抗干扰能力更好。重点是两种标准的转换。
USB转串口通讯
USB转串口主要是设备跟电脑通信,该过程需要电平转换芯片来实现,常用的芯片有CH340,PL2303,CP2102,FT232。使用的时候需要安装电平转换芯片的驱动。
原生的串口到串口
主要是控制器跟串口设备或者传感器通信,不需要电平转换芯片来转换电平,直接使用TTL电平通信。例如GPS模块。
波特率与比特率
波特率即每秒钟传输的码元个数,便于对信号进行解码。常用的波特率4800,9600,115200。比特率即每秒钟传输的二进制位数。
通讯的起始和停止信号
起始信号由逻辑0的数据位表示,停止信号可由0.5,1.5,1或2个1的数据位来表示。双方自行约定。
校验
通过校验码来避免数据在传输过程中,受到外部干扰而发生偏差。常采用奇偶校验,只能检测出发生偏差位的1位。
3.USART接发通信
要求:当stm32接收到1个字符“s”时,停止持续发送“hello windows!”; 当接收到1个字符“t”时,持续发送“hello windows!”
相关函数介绍:
①USART初始化结构体
typedef struct
{
uint32_t USART_BaudRate;//波特率BRR
uint16_t USART_WordLength;//字长CR1_M
uint16_t USART_StopBits;//停止位CR2_STOP
uint16_t USART_Parity;//校验控制CR1_PCE,CR1_PS
uint16_t USART_Mode;//模式选择CR1_TE,CR1_RE(发送和接收)
uint16_t USART_HardwareFlowControl;//硬件流选择CR3_CTSE,CR3_RTSE
} USART_InitTypeDef;
②同步时钟初始化结构体
typedef struct
{
uint16_t USART_Clock;//同步时钟CR2_CLKEN(时钟使能)
uint16_t USART_CPOL;//极性CR2_CPOL
uint16_t USART_CPHA;//相位CR2_CPRA
uint16_t USART_LastBit;//最后一个位的时钟脉冲CR2_LBC
} USART_ClockInitTypeDef;
具体代码如下:
首先再stm32cubeMX下建立工程:STM32F103C8T6核心开发板下,采用串口中断方式实现多形式的“hello windows”通信输出实例演训_stm32f103c8t6回调函数-CSDN博客
到keil界面后再主函数前加入以下代码:
char c;//指令 s:停止 t:开始
char message[]="hello windows!\n";//输出信息
char tips[]="CommandError\n";//提示1
char tips1[]="Start.....\n";//提示2
char tips2[]="Stop......\n";//提示3
int flag=0;//标志 s:停止发送 t:开始发送再main函数中设置接收中断函数
HAL_UART_Receive_IT(&huart1, (uint8_t *)&c, 1);
main函数中的while循环里面添加传输代码
if(flag==1){
//发送信息
HAL_UART_Transmit(&huart1, (uint8_t *)&message, strlen(message),0xFFFF);
//延时
HAL_Delay(1000);
}
在main函数下面重写中断处理函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//当输入的指令为0时,发送提示并改变flag
if(c=='s'){
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips2, strlen(tips2),0xFFFF);
}
//当输入的指令为1时,发送提示并改变flag
else if(c=='t'){
flag=1;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips1, strlen(tips1),0xFFFF);
}
//当输入不存在指令时,发送提示并改变flag
else {
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips, strlen(tips),0xFFFF);
}
//重新设置中断
HAL_UART_Receive_IT(&huart1, (uint8_t *)&c, 1);
}
最后效果如下:
4.复杂通信
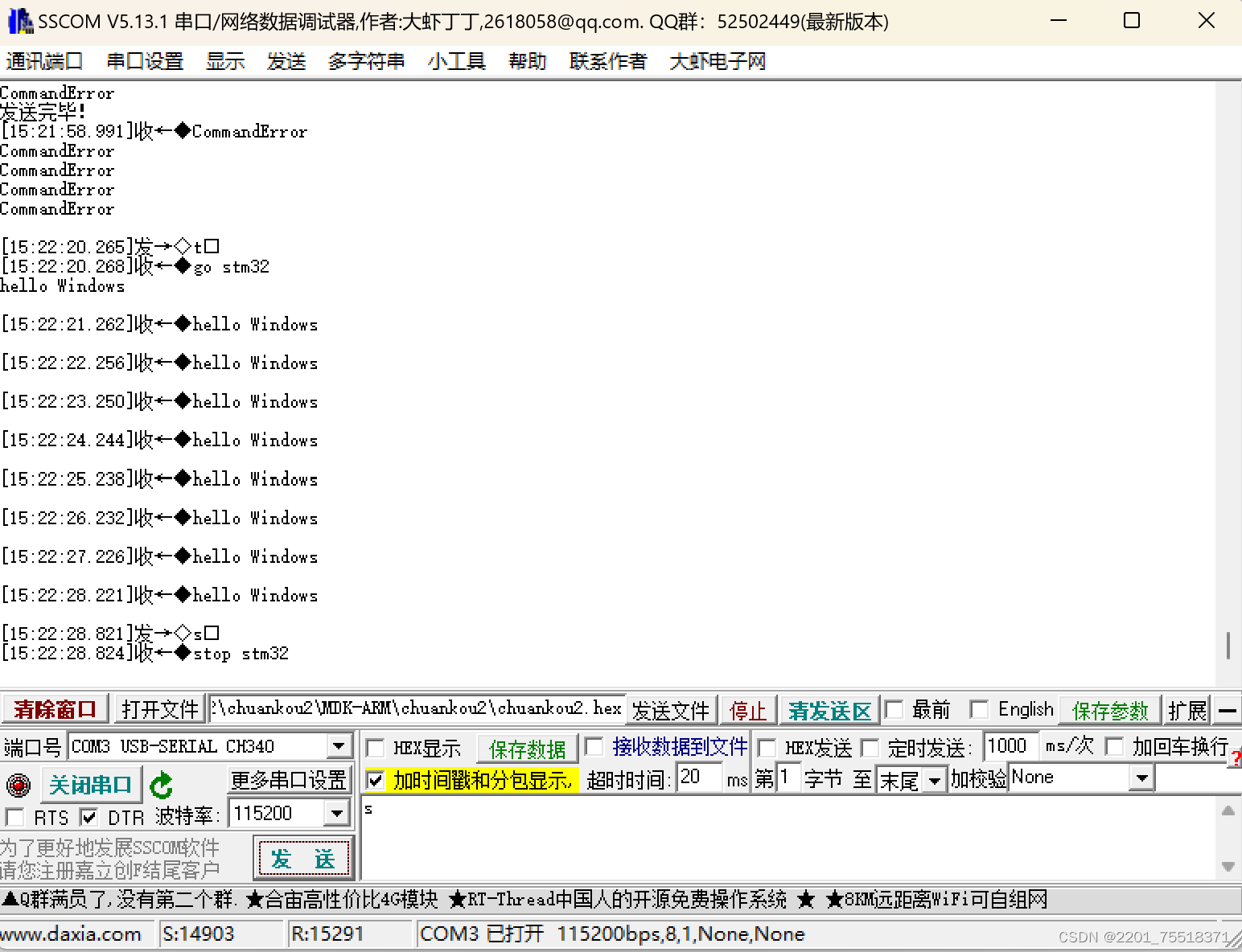
要求:当stm32接收到字符“stop stm32!”时,停止持续发送“hello windows!”; 当接收到字符“go stm32!”时,持续发送“hello windows!”
在上个代码的基础上修改中断处理函数:
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//当输入的指令为0时,发送提示并改变flag
if(c=='s'){
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips2, strlen(tips2),0xFFFF);
}
//当输入的指令为1时,发送提示并改变flag
else if(c=='t'){
flag=1;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips1, strlen(tips1),0xFFFF);
}
//当输入不存在指令时,发送提示并改变flag
else {
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips, strlen(tips),0xFFFF);
}
//重新设置中断
HAL_UART_Receive_IT(&huart1, (uint8_t *)&c, 1);
}
效果如下:
总结
标准库相较于寄存器操作看起来更复杂,但是这是因为使用了封装的函数,从编写代码的角度来说是变得更加简单的。