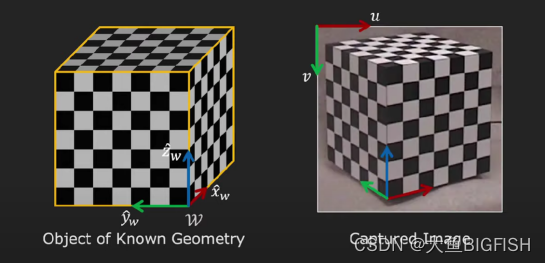
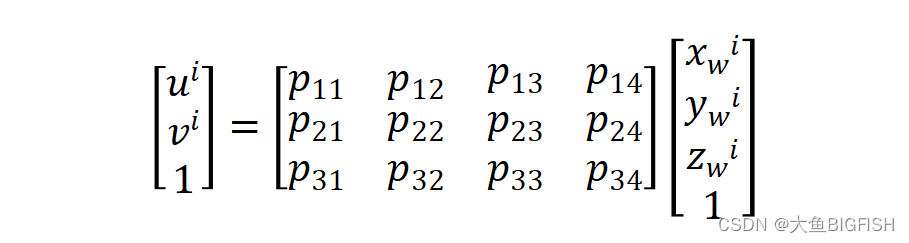
OpenCV 双目相机标定 2024-06-08 23:59 matlab, 计算机视觉, 人工智能, opencv 191人 已看 文章目录 一、简介 1.1单目相机标定 1.2双目相机标定 二、实现代码 三、实现效果 参考资料 一、简介 1.1单目相机标定 与单目相机标定类似,双目标定的目的也是要找到从世界坐标转换为图像坐标所用到的投影P矩阵各个系数(即相机的内参与外参)。具体过程如下所述: 1、首先我们需要获取一个已知图形的图像(这里我们使用MATLAB所提供的数据)。 2、找到同名像点(匹配点),这里主要是探测黑白格子之间的角点。 3、构建方程。 展开这个等式就可以表示为: