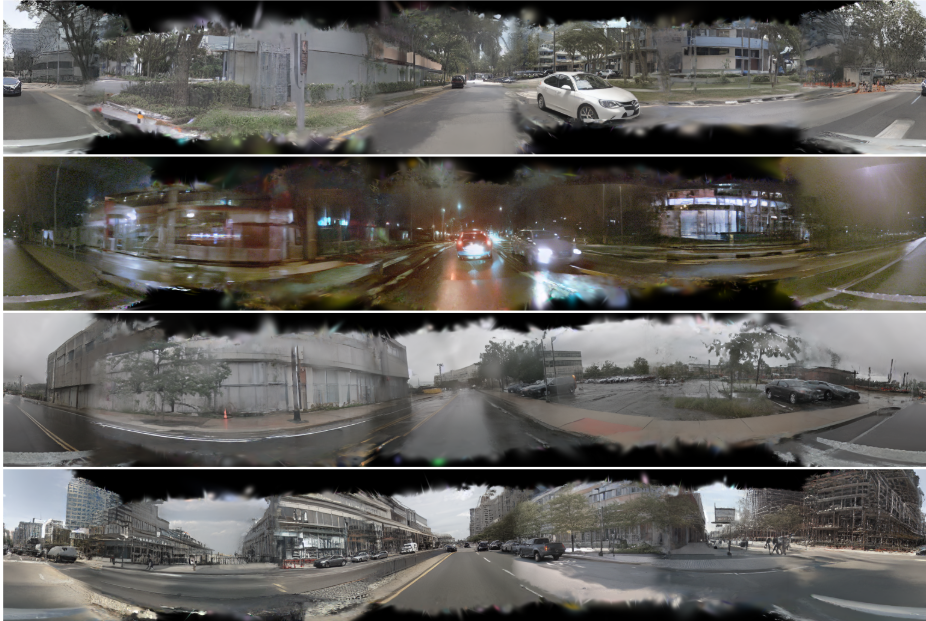
这种创新的方法使得生成过程易于控制,并且可以获取静态场景,从而实现高质量的场景重建。通过大量实验验证,MagicDrive3D框架在生成符合道路地图、3D边界框和文本描述的高度真实感的街景方面表现出色,如下图1所示,展示了生成的相机视图可以增强鸟瞰图(BEV)分割任务的训练,为场景生成提供全面的控制,并能够为自动驾驶仿真创建新颖的街景。通过在 FRONT 相机上增加 4 个不同的装置,并添加渲染视图进行训练,可以减轻来自视角变化的负面影响,下表5展示了这一点,说明了街景生成在训练感知任务中的实用性。